Версия для печати темы
Нажмите сюда для просмотра этой темы в обычном формате
Форум «Всё о Паскале» _ Железо _ Блок питания.
Автор: Altair 18.09.2004 19:39
Какой ток дает блок питания (вотльтаж и ток), и можно-ли его убрать, а вместо него поставить аккумулятор от машины? (напряжение в данном случае не не важно, если у аккумулятора оно больше - ставим сопротивление и все)
?
Автор: Shadow 19.09.2004 2:33
потребляемая мощность оборудоавния
и на какое напряжение оно расчитан
отсюда мощьность в Ваттах на Вольту будет ток потребляемого оборудования
отюда выбираем аккумулятор...
----
смотрим сколько ампер часов может дать аккумулятор от машины
--
напрмер батарейка 1 Ампер час - значит одлин час она будет давать 1 ампер
потом падение U ню и т.д. .....
----
примерно так
----
что обираешься питать
Автор: Oleg_Z_OFF 19.09.2004 2:40
Компьютер собираюсь питать, а именно:
материнку, проц на ней, хард, и эл\двигатель маленький.
Автор: APAL 19.09.2004 2:50
Если я правильно помню физику - "Вольты" зависят от нагрузки и значит вольтаж будет меняться в зависимости от того, сколько чего у тебя будет подключено, а так же с какой периодичностью "оно" будит включаться/выклячаться. (HDD, FDD, CD-ROM, Monitor - режим "спячки" имеют)
Так что нужен как минимум стабилизатор напряжения.
Автор: Олег 19.09.2004 2:52
Монитор, cD-rom,FDD не нужны!!!
Автор: Shadow 19.09.2004 4:34
ну посчитай потребл мощу-то всего оборудования... 
---
и полярность не перепутай КУТУЗОВ
----
МАТЕРИНКА/ ПРОЦЕССОР/ HDD/Видео/
-----
а еще проще что б не ситать дык посмотри на на корпусе
блока питания стандартного
----
в среднем блок питания стационарного компа выдает 200-250 вт
причем от сети он тянет примерно 1 Ампер а обеспечивает
внутреннее питание при условии что внутренне напряжение не более
12вольт опять же в зависимости от потребл мощности оборудования
----
P/S/
т.к. проц и видео и мат. плата питаются вместе то и мощноть будет общая
---
HDD питается отдельно
---
ню кто знает сколько Вт процессор 50 хотя бы есть
ага от искал
Этой весной Intel также выпустила процессоры Pentium 4-M с уменьшенной до 30 - 35 Вт потребляемой мощностью и технологией SpeedStep для использования специально в портативных компьютерах. Очевидно, Intel также имеет в своем арсенале так называемые процессоры Pentium 4-C, которые потребляют меньше, чем настольные процессоры, но больше, чем мобильные.
ню тогда 3 ампера уйдет на один процессор
----------
Athlon 60Вт но я не знаю сколько вольт подается на него
Автор: Altair 19.09.2004 10:58
Видео тоже не надо!

Робота я делаю на основе ПК.
Есть предложение начать обсуждение этого ...
Автор: Altair 19.09.2004 12:07
Вобщем идея у меня следующая.
собрать робота-тележку.
На условном макете он будет выглядеть как показанно на рисунке. (интерисующимся, могу послать по почте твердотельную модель АВТО_КАДа.)
Т.е. на тележку устанавливается материнская плата, процессор, винчестер.
Питаеться все это +двигатель аккуиялтором от автомобиля (я пока не расчитал возможно ли это, но в крайнем случае два)
Робот получает информацию с "органов" осязания. Или через веб камеру посылается сигнал, и робот по определенной схеме двигается...
Пока не важно, кокое поведение будет у робота, не важно также специализация робота ...
Главное научить его для начала передвигаться примитивным образом, получая информацию из внишенего мира. Например через сенсоры - робот движется вперед, пока не наткнется на что-нибудь, потом поворачиваект вправо или влево в зависимости от обстоятельств.
То есть идея заключается в построении примитивного колесного робота, на основе ПК.
Эскизы прикрепленных изображений
Автор: xds 19.09.2004 14:07
Если использовать в качестве источника питания один автомобильный аккумулятор, то встает проблема двуполярных 12 В. Есть вероятность что они все же будут нужны мамке (либо нужна старая мама - которая не заметит отсутвия одного из питающих напряжений).
Получить однополярные 5 В и 12 В (или даже двуполярные 5 В) от одного аккумулятора несложно, если его конструкция позволяет сделать вывод от перемычки между банками.
Для получения функционального аналога блока питания ПК (напряжения +5 В, -5 В, +12 В и -12 В) нужно как минимум 2 автомобильных аккумулятора.
Можно использовать Flash Drive вместо винта: меньше потребляемая мощность, но придется решить проблему начальной загрузки.
Для начала в качестве "органов чувств" можно использовать ИК-, ультразвуковой или радиодальномер.
Отдельные подсистемы робота могут автономно управляться микроконтроллерами. Т. о. можно организовать достаточно интеллектуальный "спящий" режим без участия основного ЦП (одного из основных потребителей после сервоузла). В общем случае, использование МК позволит упростить рутинные управляющие процедуры и разгрузить ЦП.
Автор: Altair 19.09.2004 14:17
Так, а подробнее можно?
Тогда уж дисковод - для загрузки а потом вообще его не используем, все в памяти!
Автор: Shadow 19.09.2004 20:39
---
тогда возьми 386DX тебе больше и не надо
---
или
---
собери робата на
1. логических эелментах это чисто схема управления
---
кторая вклю реле
---
2. вторая схема это релейная или на чистых реле или на электронных
---
которая влюч дигатели
--
3. после реле приводы на моторчиках можно от флоповертов они дискретные
----
4. управление через LPT порт
---
проект долгий кропотливый
=========
влюбом случае тебепридется эту схему собирать как переходник
от материнской платы к дивигателям
Автор: SKVOZNJAK 19.09.2004 21:30
Есть другое направление. Не заменять стандартный блок питания а подключиться к нему в опеределённом месте цепи. Тогда можно будет использовать родной стабилизатор напряжения и проводку. На входе блока питани должен быть преобразователь переменного тока в постоянный, его-то и нужно выкинуть
Автор: SKVOZNJAK 19.09.2004 21:41
Без мультиметра лучше не начинай. С измерением тока у этого прибора возникнут проблемы. Но в любом случае не вздумай померить силу тока там где большое напряжение и ток - м. плюнет огнём и уснёт надолго ;)
Автор: Shadow 20.09.2004 0:21
SKVOZNJAK
ему нужен независимый источник питания чоб он далеко ехать мог
не от розетки если он использует аккумулятор то зачем ему стабилизатор 
Автор: SKVOZNJAK 20.09.2004 1:50
Это в какой-нибудь сэге или денди всё так просто - врубил что-нибудь, и оно работает. А в ПК куча проводов, штекеров, напряжений как минимум 2. Система отключения питания при перегреве и скачках напряжения. Зачем делать всё с нуля, проще переделать готовое. Да и аккумулятор штука не стабильная, напряжение будет падать, да и температура должна на него влиять. Блок питания не такой уж и дорогой по сравнению с ценой компьютера. Да и портить его не обязательно - перерезать несколько дорожек и т. д. Только вначале нужно замерить его входные и выходные напряжения чтобы можно было сравнить с тем что получилось после переделки.
Автор: Shadow 20.09.2004 6:51
SKVOZNJAK
какие скачки анпряжения у него аккумулятор
только ели падение насчет перегрева дык в новых мат платах это прдусмотренно...
-----
ню или можно предусмотреть самому
-----
предложение перместить эту тему в ЖЕЛЕЗО
Автор: xds 20.09.2004 12:54
Итак, по порядку...
Возможны различные схемы подключения аккумуляторов. В основе наиболее простой лежит снятие напряжений +5 В и -5 В с перемычек между банками (рис. 1). Место подключения ищется с помощью вольтметра относительно общего провода (GND). Для реализации питания таким способом придется найти аккумуляторы, в которых перемычки либо выведены на поверхность (как у некоторых отечественных), либо доступны без разрушения корпусов банок. Второй способ основан на использовании интегральных стабилизаторов на шинах +5 В и -5 В (рис. 2). Для него годятся любые аккумуляторы на 12 В достаточной емкости. Стабилизатор +5 В - положительный, на макс. доп. ток не менее 10 А; -5 В - отрицательный, макс. доп. ток не менее 0,5 А. Микросхема-стабилизатор на 10 А - штука достаточно дефицитная, поэтому +5 В можно получить линейным стабилизатором на транзисторах. В обоих случаях на каждую шину питания следует установит по плавкому предохранителю на соответствующие токи.
Имеет смысл использовать мамку, на которой еще присутствует разъем питания AT (P8/P9), но в которую уже интегрированы контроллеры FDD, HDD и LPT. Дело в том, что на ATX выводится 3,3 В, поэтому мама, изначально рассчитанная только на такой способ подключения источника, не умеет сама получать напряжение 3,3 В (рис. 3, 4). Кстати, найдя подходящую плату, можно померить потребляемые токи по всем шинам и уже более точно ориентироваться в отношении стабилизаторов. Идея переделки блока ПК не так тривиальна, какой может показаться на первый взгляд – он представляет собой импульсный источник напряжения.
Эскизы прикрепленных изображений

Автор: xds 20.09.2004 13:02
предложение перместить эту тему в ЖЕЛЕЗО
Поддерживаю. Возможно стоит поменять название: полагаю, что мы постепенно будем отодвигаться от темы в её текущей формулировке...
Переместил в "железо".
Автор: Shadow 21.09.2004 2:40
насчет микросхем стабилизаторов
непомнюточно но еть норальные называюся EN или ЕН
---
еэнки потом стоит цифра это ток
----
а вольтаж получить пожно и обыкновенным
делителем напряжения на R(сопротивлен)
рассчеты не сложные... естественно нужно произвести
необходимый выбор сопротивления по Ом и мощноcти в зависимости о проход тока
Автор: xds 21.09.2004 6:32
Отечественных 142ЕНx на такие токи кажется нет. Нужны зарубежные. Впрочем, найти как сами микросхемы, так и информацию по ним не составит ощутимого труда.
Две проблемы, возникающие при понижении напряжения с помощью делителя:
а) напряжение на нагрузке зависит от текущей потребляемой ей мощности (сопротивления нагрузки); т. о. такая схема подходит толко для статических (P = const) нагрузок: светодиоды, лампочки, эл. двигатели и т. п.);
б) все "лишнее" напряжение греет воздух вокруг делителя; к тому же потребуется резистор на достаточно большую макс. доп. мощность рассеяния.
Автор: SKVOZNJAK 21.09.2004 13:40
Shadow Уже пробовал изготовить мышеловку на батарейках И какой результат? В холодном помещении батарейка замёрзла, прибор не сработал, хотя, загорись спичка, фабричная петарда всё равно не обеспечила бы хоть какое-то приличное давление газа в замкнутом объёме. Но факт остаётся фактом: привычные источники питания могут подвести в нестандартной ситуации. Аккамулятор можно банально уронить, при малом уровне жидкости, она будет переливаться при наклонах, кривые модели тож не следует считать фантастикой. Хотя, можно и не перестраховываться, дело хозяйское
Регулировать напряжение резисторами тоже пробовал Спектрумовский блок питания при этом стал напоминать калорифер, на ПК получится мини ТЭЦ.
Напряжение получаемое резисторами и стабилитронами (попробуй ещё найти подходящий) используется в блоках питания большой мощности только в качестве эталона. Который затем усиливается усилителями, ну и стабилизаторы там тож имеются ;) Т. к. на полупроводники и резисторы оказывает влияние температура. Мы пришли к тому, что воспроизводить стандартный блок питания, хоть и в упрощённой форме всё-равно придётя <_< Так не лучше-ли вначале поэкспериментировать со стандартным. Выбрать наиболее разбираемую модель и вперёд, попытка не пытка, не правда-ли Лаврентий Павлович
Автор: Shadow 22.09.2004 1:40
Oleg_Z
----
основное питание процесора 5 вольт а мощность примерно 50-60Вт
основной ток будет примерно 10-16 ампер поэтому
тебе придется искать материнку от но - бука т.к. там уже собран делитель на стабилзаторах
-----------
xds
согласен делитель не покатит сопративление нужно больших мощностей
а также радиаторы
================
ПОЭТОМУ вывод такой нужно искатьмат плату именно от НОУТБУКА
Автор: Shadow 22.09.2004 1:44
SKVOZNJAK
вы совершенно не по теме говорите
что это
Автор: SKVOZNJAK 22.09.2004 5:37
Разве непонятно  Мышеловка самострел, электронный прибор. Крыся дотрагивается до САЛА, отклоняет контакт вверх или вниз... Это к вопросу о надёжности надёжных казалось бы элементов питания.
Мышеловка самострел, электронный прибор. Крыся дотрагивается до САЛА, отклоняет контакт вверх или вниз... Это к вопросу о надёжности надёжных казалось бы элементов питания.
ЗЫ. Ну если вам проще использовать материнку от ноотбука, со всеми вытекающими последствиями, то могу лишь пожелать удачи.
Автор: GoodWind 27.09.2004 11:35
Oleg_Z
как продвигается работа ?
Автор: Altair 27.09.2004 12:09
Пока никак.
нет времени, деталей, достаточных и необходимых знаний в предметной области, точной цели.
Пока откладывается...
Автор: Shadow 27.09.2004 21:08
Oleg_Z
ды какая концепция вашей идеи...
т.е. я имел в виду как собирать будешь из чего
ИМХО я бы отрыл гденить материнку от нутбука 386DX
и собрал бы на ней
Автор: GoodWind 27.09.2004 23:52
да, больше и не надо..
Автор: Altair 28.09.2004 10:17
Найти бы еще это... деньги нужны, кто-же мне это бесплатно отдаст, а денег у меня нет, студент я.
Автор: GoodWind 28.09.2004 10:32
мдя.... трудно быть студентом....но весело !
Автор: Altair 28.09.2004 10:46
Ага, я тут на матане сижу, и так стало смешно, что просто чуть не умер от смеха, хотя потом никак не мог вспомнить, что же меня так рассмешило!!
Автор: SKVOZNJAK 1.10.2004 17:55
Есть один непопулярный способ сэкономить на ноотбуке :D Прочитать несколько книг по электорнике и электротехнике для начинающих.
Автор: Altair 1.10.2004 18:07
:D
Хорошая идея. Но тогда выйдет типичный робот. На основе микроконтрелеров.
Автор: Shadow 1.10.2004 19:09
все равно придеться самому тогда собирать схему по току, а так она уже на ноотбуке собрана
--------
да и 386 ноотбук стоит не дорого рублей 300
------
SKVOZNJAK
если у Вас есть какие либо идее то почему бы Вам ими не поделиться,
а то я лично от Вас никаких конструктивных предложений не видел
только разговор совершенно не по делу
-------
Автор: Altair 1.10.2004 19:21
Shadow, прав!
Все равно придется собирать схему.
Просто мне очень хочется собрать робота простойшего, но все упирается в деньги.
Конечно если он действительно стоит порядка 300 рублей, то проблемм нет. Одной стипендии хватит на него.
Я никак не могу определиться что мне нужно. Если ноутбук, то нет необходимости выдумывать схему для аккумуляторов.
Если на основе компа персонального, то будет дешевле (если тот-же 386) но я не совсем понял как аккумулятор от автомобиля пристроить... 
Автор: SKVOZNJAK 2.10.2004 1:24
Вывод такой: используй те элементы, которыми умеешь пользоваться. Получается ноотбук. Тогда переходим к следующему вопросу, стыковке компа с электродвигателями. Это возможно через усилители, но к какому устройству компа их подключать? Можно к беперу, но это 1 канал, а желательно побольше. Тогда можно рассмотреть подлючение вместо сидюка. На каждый спользуемый провод ленточного кабеля сидюка по усилку Но тогда придётся контролировать каждый импульс. Можно конечно опытным путём составить таблицу - какие команды выдают импульсы и на каких проводах. Импульсы надо чем-то регистрировать. Можно попробовать осциллограф.
Автор: Shadow 2.10.2004 2:00
SKVOZNJAK
----
причем тут усилитель
управлять двигателями можно и через разные питания
т.е. через два раздельных (не электрически)
-------
1. например 12 питание на двигатели оно питание будет подаваться
на двигатели только с помощью управляющей схемы можно на электронных реле (триггерах) или на контактных 1 реле замкнуто 0 реле отключено
--------
2.
управляющая схема электронные реле которые при подаче на них
потенциала будут замыкать контакты (12 вольт) т.е. обеспечивать
подачу напряжения на двигатели
-----
3.
поворот можно так же обеспечить тоже двигателем дискретным как от флоповерта т.е. шаговый
---
4.
----
Управление можно взять с какого нить порта типа LPT или COM
Естественно нужно обеспечить прием передачу по этому порту
все это на вскидку конечно нужно разбить на блоки продумать каждый блок в отдельности
электронные реле занимают места меньше
Автор: Shadow 2.10.2004 2:11
сначала можно вот как посмотреть сколько точно тока жрет комп
для этого в последовательно между аккумул и самим клмпом
можно включить амперметр сначала ампер на 80 поставить руч
---------------
а паралельно поставить вольметр чтобы посмотреть сколько вольт до включения на аккумул и после т.е. просадку
-------
и вообще сам ноотбук можно не разбирать его можно целиком
положить встроить в корпус робота
-------
если все таки цель собрать робота то можно сначала поробовать собрать его
на родных аккум... ведь вся сложно ляжит на схему согласования
от LPT или COM и двигателями
Автор: GoodWind 2.10.2004 2:11
1. если использовать маму от ноутбука + аккумулятор от него-же, то робот будет значительно легче, чем если использова мать от десктопа + автомобильный аккумулятор (который весит немало), значит и движители понадобятся не столь мощные, следвательно и их можно будет питать от ноутовского аккумулятора (второго).
2. по вопросу управления двигателями я аабсолютно согласен с Shadow
зачем курочить шлейф от сидюка, если есть порты ввода/вывода, через которые выводить инфу (в данном случае крутить/не крутить) значительно удобнее, они для этого и предназначены.
Автор: SKVOZNJAK 2.10.2004 9:40
4 Лпт вылетел из головы когда представлял нутро ноутбука - мало ими в детстве пользовался Но так оно прямее будет.
1, 2 Электромеханические реле это те же усилители, только на другой элементной базе. При небольшой частоте их тоже можно использовать. Если конечно обеспечить достаточный ток на входе. Можно использовать старые микросхемы серии кажется 555, они питаются от 5в - свежей плосской батарейки. ИС в этом случае представляется просто как набор триггеров. Может немного усилит силу тока, если в порту её меньше. Без измерений судить трудно
Автор: xds 2.10.2004 12:33
положить встроить в корпус робота
Абсолютно согласен.
Предлагаю использовать для управления двигателями транзисторные ключи. LPT порт имеет 5 мА ТТЛ-выходы, чего c запасом хватит для открытия ключа на составном, а возможно и на одном транзисторе - в зависимости от нагрузки (экспериментально доказано). При нехватке линий порта, их количество легко наращивается подключением дополнительных регистров.
Вот основные тезисы моего взгляда на эту задачу. Компоненты системы (в рекомендуемом порядке реализации - по убыванию сложности):
1) управляемый конструктив: шасси, корпус, электромеханические исполнительные уcтройства и электронные (электромеханические) датчики;
2) блок управления - электронная схема (одна плата), подключаемая к ноутбуку через порт LPT и содержащая:
- электронные ключи, управляющие двигателями и (или) другими исполнительными механизмами;
- электронные узлы, обеспечивающие работу "органов чувств" - датчиков;
- (при необходимости) логику расширения интерфейса;
3) управляющее микропроцессорное устройство - ноутбук (без изменений в конструкции);
4) ПО управляющего устройства.
На мой взгляд, действительно нетривиальной в реализации является механическая часть. Я предлагаю начать именно с нее: следует сконструировать устройство, которое может осуществлять перемещение в пространстве, как результат выполнения простых команд в виде замыкания проводков, или (более эстетичное решение) переключения нескольких тумблеров.
Автор: Shadow 2.10.2004 23:56
SKVOZNJAK
реле это не усилители они просто скажем много-контактные комутирующие устройства у которых есть управляющая пара контактов по низкому напряжению и несколько парконтактов некоторые могут быть замкнутые или
разомкнутые по большему напряжению
------
электронные реле это просто на транзисторах собраные неболшие схемки
триггеры - например у них тоже есть положение открыт закрыт
------
усилители же это многокаскадные или модно на одном
каскаде т.е. на одном транзисторе собрать усилитель напрмер твоего голоса
просто через тразистор идет раскачка сигнала поступающего на базу тразистора от микрофона он (сигнал) то болше то меньше окрывает тразистор
отчего в динамике слышет твой голос
естественно нужно подобрать правильную рабочую точку тарнзистора в зависимости от напряженя и на оном каскаде тябя будет слышно плохо для этого нужно ставить следующий каскад на боле сильном транзисторе и т.д.
и пользовать обратной отрицательной связью и т.д.
Автор: Shadow 2.10.2004 23:59
xds
вот уже разбили на блоки возможно некоторые моменты не учли, но
процессе работы это выявится
Автор: SKVOZNJAK 4.10.2004 0:36
Shadow Транзисторы, это тоже не усилители, а их элементы.
Только мне кажется, если развивать тему опережающими темпами, может получиться как с компьютерной игрой : всё просчитали, порадовались, огорчились, виртуально поиграли, без компа. И возник следующий вопрос - а зачем её дальше делать если из неё уже выкачано всё что можно. Первый этап работы комп, питание, переходник лпт-шасси. На нём и следует пока заострить внимание, или подождать следующего этапа.
Автор: xds 4.10.2004 11:17
Так, пора прекратить этот затянувшийся оффтоп:
1) транзисторный ключ (aka электронное реле) - частный случай усилителя напряжения;
2) реле (обычное) - электромеханическое коммутирующее устройство;
3) шасси - несущая конструкция, к которой крепятся все прочие узлы системы; шасси имеет удаленно-косвенное и условное отношение к интерфейсу LPT :-);
4) разработку системы стоит начать с электромеханической части - это наиболее сложная подзадача среди прочих, решаемых за конечное время.
Oleg_Z
У тебя есть идеи по п. 4)?
Автор: Altair 17.01.2007 19:12
У меня обновленная идея....
Я хочу начать с самого простого.
Робот-машинка.
Поведение.
Машинка едет всегда вперед, пока не соприкоснется с чем-то.
При соприкосновении с чем-то машинка едет назад до соприкосновения задом с чем-то.
Далее снова вперед и т.д.
При этом механика устроена так, что при движении назад, машинка движется не по прямой а по дуге (поворачивает) в случайную сторону (вправо или влево)
После недолгого раздумья, я пришел к выводу, что мне необходимо (верхний теоретический уровень, "вскидка"):
электродвигатель, примерно на 5-6 вольт.
4 транзистора для реализации H-моста эл. двигателя. (переключение вперед-назад).
Необходим триггер (я думаю RS подойдет, я прав?) для запоминания информации "вперед-назад"
Триггер - это два элемента И-НЕ , а значит всего 4 диода и 2 транзистора.
Опыта построения схем - 0 (без палочки (если шрифт не системный
))Промышленных моделей полупроводниковых приборов нет, поэтому нужна консультация что и куда мне надо.
Автор: Lapp 17.01.2007 19:42
В точности такой набор "сделай сам" я купил некоторое время назад для дочери . Собрали, работает исправно. Движение назад по дуге обеспечивается специальным устройством подвески колеса.
Мне кажется, твой проект нуждается в одном уточнении: при движении назад нужен также таймер: если столкновения долго нет, то снова включать передний ход. Иначе (на практике) возможно зацикливание.
Автор: Altair 17.01.2007 19:48
Значит не только у меня такие мысли
Насчет зацикливания я не подумал, но впрочем, это реализуется механически.
С другой стороны - как может быть зацикливание? Ведь стенка никуда не убирается.......
Кстати, такой механизм, позволит обходить некоторые препятствия...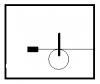
Lapp, а можешь сфотографировать этот набор?
Автор: xds 17.01.2007 22:40
Триггер можно и на ИС (74xx00, 74xx74, 4013 - у последней питание 5..15В), драйвер двигателя - на L293D (до 600 мА) или L298 (до 2 А). Вообще, определись с механикой - электроника тут элементарная (надо будет - набросаю схемку и список деталей)...
По тайм-ауту лучше останавливаться и подавать сигнал об исключительной ситуации
Автор: Bokul 18.01.2007 5:11
Я хочу начать с самого простого.
Вот чуть-чуть посложнее: http://www.cs.nyu.edu/~yann/research/dave/
Автор: Lapp 19.01.2007 17:01

Значит не только у меня такие мысли
Насчет зацикливания я не подумал, но впрочем, это реализуется механически.
С другой стороны - как может быть зацикливание? Ведь стенка никуда не убирается.......
Кстати, такой механизм, позволит обходить некоторые препятствия...
Lapp, а можешь сфотографировать этот набор?
Дык. Идея автономного робота - это очень интересно.
Зацикливание возможно, если окружность не вполне точная (я же написал - на практике). Представь себе, что он ударился о небольшой столбик, поехал назад, а потом промахнулся мимо того столба.. Я думаю, в реальных условиях (не совсем ровная поверхность) это вполне возможно.
Вот, сфотографировал.. Не набор, конечно, а в собранном виде. Коробка выкинута, так что я даже не смог найти в Инете никаких ссылок на это дело.. А сделано очень грамотно: аккуратно, продуманно, все подходит идеально, и инструкция тоже была понятная. Правда, паять ничего не пришлось.. Дизайн мне нравится - необычный такой. А еще можно отметить, что датчик столкновения на самом деле звуковой. Он ударяется, слышит звук удара и срабатывает (микрофон прямо в носу). Так что его можно обманывать громкими звуками, типа хлопнуть в ладоши (а дочка просто визжала
).Переднее колесо поворачивается само по себе при езде назад, так как прикреплено на свободно поворачивающемся плече (на фото можно видеть).
С повернутым передним колесом:

Кверху пузом:

С прямым передним колесом:

Автор: xds 19.01.2007 21:00
Вообще, трёхколесная тележка довольно удобна в управлении - на каждое из двух ведущих колёс работает свой двигатель, а третье свободно поворачивается. Кстати, неплохо сделано в игрушках Big Trak и Электроника ИМ-11 - там используется 6 колёс: средняя пара - ведущая, с резиновым ободом (отчего несколько большего диаметра, чем остальные), в задней и передней паре колёса вращаются свободно и независимо. На ведущую пару работает два двигателя с редукторами и синхронизатором (работает при движении вперёд и назад). Также есть герконовые (ИМ-11) или оптические (Big Trak) датчики смещения.
http://www.robotroom.com/BigTrak.html
Всё же стоит определиться с ходовой частью. Для начальных экспериментов за основу можно взять какую-нибудь недорогую игрушку.
Автор: AruNimotsi 2.07.2007 5:54
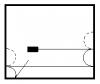
Мне кажется что движение назад по дуге(смену курса) можно упростить, при столкновении - переключить полярность питающего элемента (на короткий промежуток времени например разрядка конденсатора), при этом напряжение подается только на одно ведущее колесо (как в скрепере)... примерно так...
еще гдето в цепь нужно релюшку вставить которая будет удерживатьконтакт разомкнутым пока идет разрядка..
PS/ в электротехнике не силен какой конденсатор нужен(и пойдет ли конденсатор вообще) не знаю, да и диод мог не той стороной нарисовать.., просьба сильно не ругать..
Эскизы прикрепленных изображений
Автор: xds 2.07.2007 15:47
Не очень понял, как работает приложенная схема (особенно, роль диода) , но из твоего описания родилась простая схемка:![]()
Двигатель M1 питается напряжением элемента G1 и вращается непрерывно в одном и том же направлении. Источник питания двигателя M2 - G1 или G2 - выбирается контактами реле K1. Контакт S1 кратковременно замыкается при столкновении, заряжая конденсатор С1, одновременно переключая реле. После размыкания S1, реле некоторое время остается во включённом состоянии, питаясь от конденсатора. Т. о., после столкновения двигатель M2 некоторое время вращается противоположно двигателю M1, разворачивая тележку на месте.
Возможен вариант с одним элементом питания и реле с двумя переключающими группами контактов.
P. S. МК и полупроводниковую логику пока отложим ...
Добавлено через 10 мин.
Диод, будучи перевёрнутым, привиделся мне в качестве источника криволинейности траектории - за счёт прямого падения на переходе на один из двигателей будет подаваться на 0,6 - 1 В меньше
Автор: Гость 2.07.2007 18:27
Ну да, так и есть, он отсекает 1 из двигателей при смене полярности
Автор: AruNimotsi 2.07.2007 18:30
Опять извините... компов много я - один... никак не запомню на каком автозаполнение включено а на каком нет.. (пост мой)
Изначально в схеме предпологалось следующее..
При размыкании контакта батарея выпадает из цепи и начинается разрядка конденсатора - при этом соответственно ток начинает теч в другую сторону.... (Т.Е. КОНДЕНСАТОР ВЫПОЛНЯЕТ ФУНКЦИЮ ВТОРОГО ИСТОЧНИКА ПИТАНИЯ.... судя по тому что конденсаторов на мат. плате хватает чтобы крутнуть кулерами такой вариант возможен).. при этом в обратную сторону вращается только один движок - ибо диод... использование реле подразумевалось для большей паузы т.к. изначально контакт размыкается кратковременно..
Автор: xds 2.07.2007 19:31
Разность потенциалов между выводами конденсатора не поменяет свой знак при переходе от заряда к разряду. Направление тока поменяется только в выводах конденсатора, а для двигателей ток по-прежнему будет течь в направлении, заданном при включении батареи. Возможно, ты смотрел в сторону колебательного контура, но там поворот фазы напряжения создаёт индуктивность. Емкость стремится сохранить неизменной разность потенциалов (в т. ч., её знак), а индуктивность - ток (в т. ч., его направление).